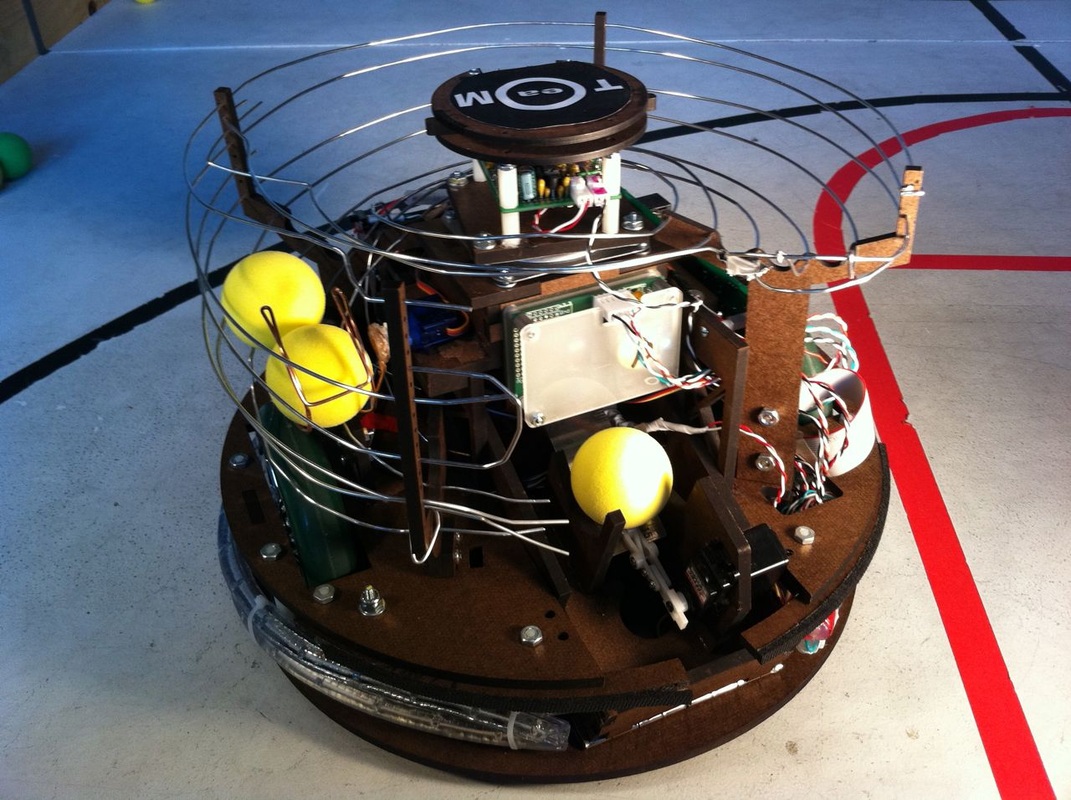
Meet our robot, Kenny
Kenny stands 10 inches tall and
has a body diameter of 13 inches, which coupled with a battery filled base
gives him a very low center of mass. Kenny is powered by three 7.4V NiCd
batteries, using a direct motor drivetrain to cruise around on two 5-inch
wheels and two ball transfers in front and back. At approximately 22V Kenny can
zip around at over 4 ft/sec (although he prefers going at 85% speed).
Navigation
To navigate around the field,
Kenny has two eyes (IR transistors) that each have a 15-degree field of view
and are a bit cross-eyed. As a result, if he can see an object (emitting IR of
course) with both eyes, he is looking directly at it. If he goes off-path and
only sees the object with one eye, he knows exactly which direction to turn
back to. Kenny's eyes are also on a servo-driven turret that allows him to make
precise angled turns with respect to an IR signal. For example, if he rotates
his eyes 15 degrees to the right, when he rotates his body to find an IR
signal, his body is 15 degrees to the left of where he would be if his eyes
were looking straight.
Shooting
To shoot Nerf balls, Kenny uses a cantilevered stainless steel ruler, which acts as a catapult. When a ball is loaded at the end of the ruler, a servo cocks the ruler tip down. As the servo horn rotates through the ruler and releases it, the ball is flicked with constant force to a precise location every time.
Gameplay
At the start of a game, Kenny
rotates to find a dispenser and drives straight to it. As he crosses one black
line, five base-mounted tape sensors trigger, and he slows down (from 85% to
50%) before hitting the wall. To detect the walls and know that he is at a
dispenser, Kenny has two bump sensors (limit switches) that span the front of
his body. Once the wall is detected, Kenny backs up a bit, rotates to find the
hoop beacon, and drives straight until the 3-pt line is detected with the tape
sensors. To compensate for the angle between edge of the hoop beacon and the
center of the hoop, Kenny cocks his eyes 10 to 15 degrees (found by empirically
calibrating) in the appropriate direction. Kenny, now pointing directly at the
basket and under the dispenser, requests for balls to be dropped into his
spiral aluminum-wire ball harvester. When a ball reaches his servo-powered ball
gate, a tape sensor detects it and Kenny opens up the gate to release the ball
to the shooter. Once Kenny is done shooting balls from that dispenser, he
shuttles over to the opposite dispenser and repeats the process until the
two-minute period is over.
Performance
With his zippy drivetrain and long-distance shooting, Kenny is able to gather a whopping 21 balls per round, shooting with 80-90% accuracy. Kenny does this all with remarkable showmanship, with a combination of ornamental LED and Electroluminescent wire lighting to please the crowd.
Download this brief description of Kenny's functionality as a PDF below:
| OnePager_TeamTom.pdf |
