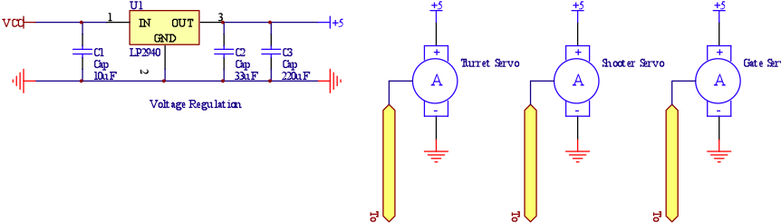
Servos
Our three servos controlled the angular position of the beacon sensing turret, the shooting mechanism, and the ball-release gate. A single power regulator, capable of sourcing an amp of current, was used to run all three servos at 5V.
| Team T.O.M. of Stanford's 2011 ME218B |
|
