Bump Sensing and Other Input
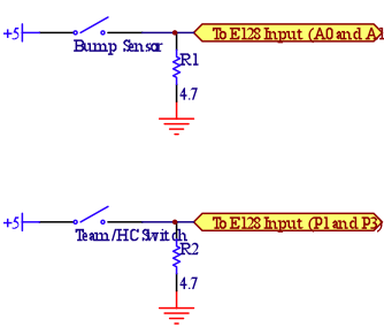
Limit switches behind a mechanical bump sensor were used to detect when our robot reached a wall. Mechanical stops were included so that, during impact, no significant load was transmitted to the limit switches.
Our robot also had two switches that could be set before a round. One set our team color, and the other selected whether to use half-court or full-court strategy.
Power for all switches was provided by the same regulator as the tape senors.
Our robot also had two switches that could be set before a round. One set our team color, and the other selected whether to use half-court or full-court strategy.
Power for all switches was provided by the same regulator as the tape senors.