Ball Harvester
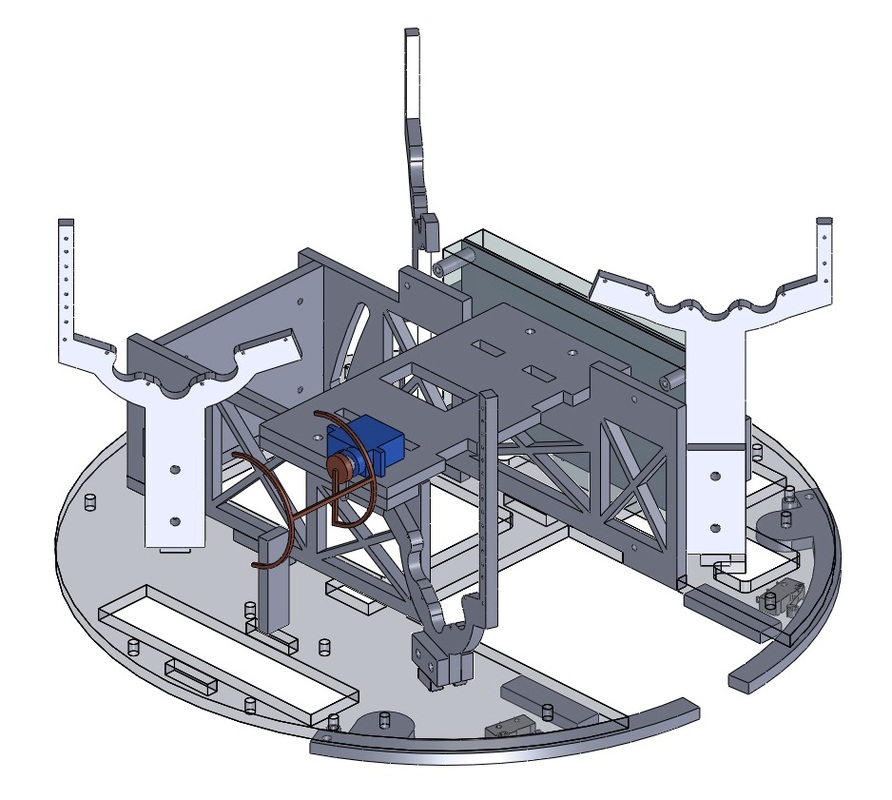
Drawing of ball harvester platform sans wires (bent in-situ).
On the top platform is the ball harvester that is comprised of four towers, in which 1/16" aluminum wire is fed through the tiny holes to make a spiral track (not shown in the CAD drawing, see pictures below) that goes around the robot and is stopped by a ball gate. A tape sensor detects if a ball is at the gate, and a servo releases balls one by one to the shooter.
Also mounted on this top platform are the bump sensors (only one limit switch is that look like whiskers. When the robot bumps the wall, it knows the dispenser has been reached. The whiskers have stops that prevent them from getting depressed too far and pulled too far.
Like the bottom platform, the top platform has holes around the perimeter for standoffs to hold the two platforms together.
Also mounted on this top platform are the bump sensors (only one limit switch is that look like whiskers. When the robot bumps the wall, it knows the dispenser has been reached. The whiskers have stops that prevent them from getting depressed too far and pulled too far.
Like the bottom platform, the top platform has holes around the perimeter for standoffs to hold the two platforms together.
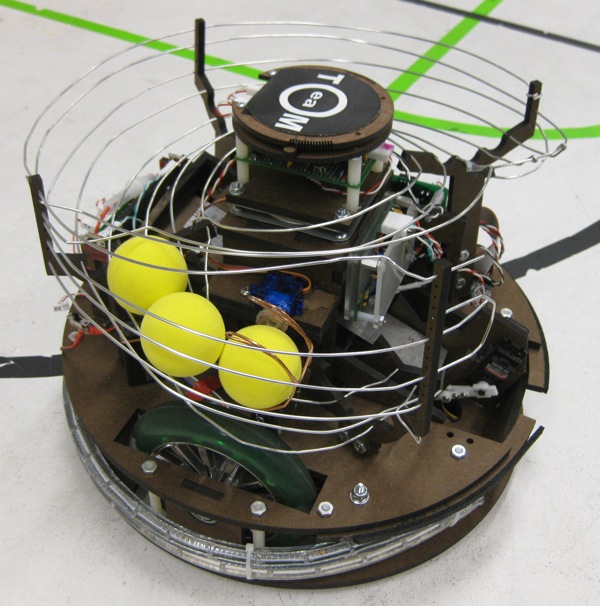 Side view of ball harvester with three balls stopped at servo gate. |
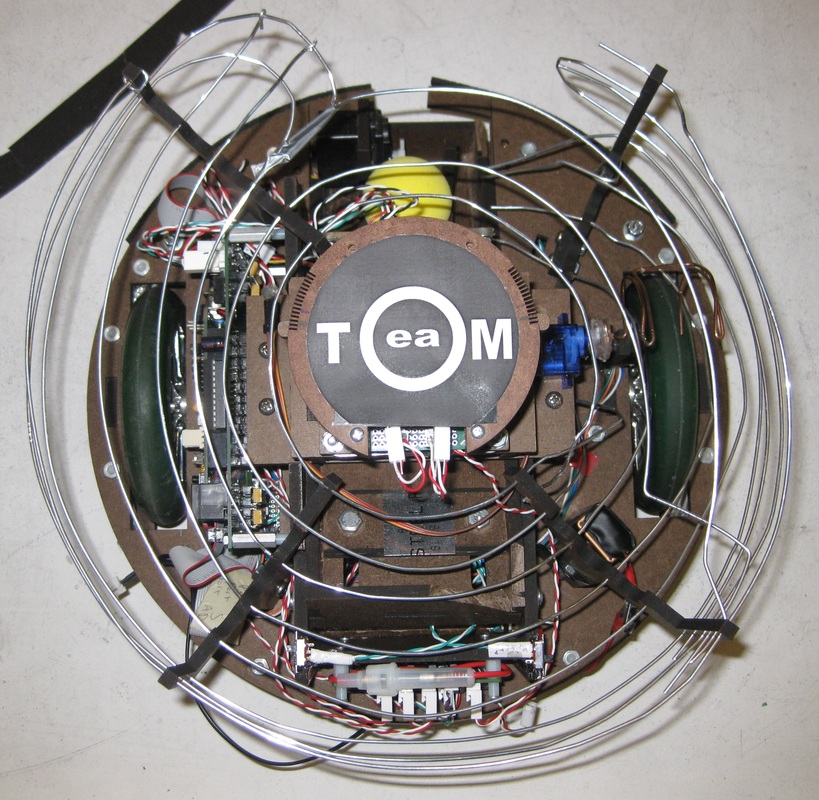 Top view of ball harvester, as well as the beacon sensing turret. |
Ball Collection and Storage |
Ball Gate Function |
