Project Description
Playing field
The objection of this year's game was to simulate a scaled-down version of basketball with autonomous robots! Below is a description of the project. To see our solution, check out our design and strategy pages.
During the game, robots communicated wirelessly through an "offensive coordinator" to query the status of the game, to dispense balls, and to request a change in the hoop diameter. Each team was assigned a team color (red or green) and two dispensers, and was allowed a maximum of three balls per team per dispenser within a 30 second period. To maximize one's score, a robot could request the hoop diameter to be smaller (from 9" to 6") for a 3-pt basket (otherwise the bigger basket counts for 2 pts).
During the game, robots communicated wirelessly through an "offensive coordinator" to query the status of the game, to dispense balls, and to request a change in the hoop diameter. Each team was assigned a team color (red or green) and two dispensers, and was allowed a maximum of three balls per team per dispenser within a 30 second period. To maximize one's score, a robot could request the hoop diameter to be smaller (from 9" to 6") for a 3-pt basket (otherwise the bigger basket counts for 2 pts).

Hoop schematic
Teams went head to head, first in a half-court non-contact mode, where the two dispensers closest to a team's hoop was theirs. In full-court mode (unfortunately played only once in the finals) teams were randomly assigned two dispensers from any of the four on the field, but could only score in their respective team color hoop. Robots had 2 minutes to collect and score as many Nerf balls as they could. The team with the highest score moved on to the next round. In the event of a non-zero tie, the sudden death playoff is won by the first robot to make a basket.
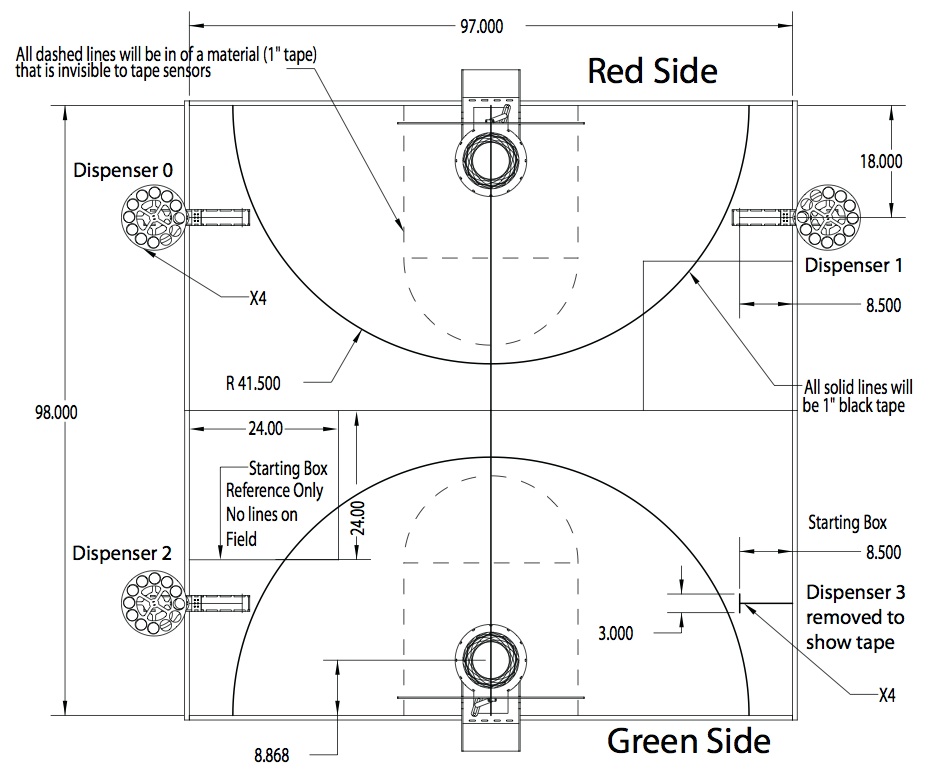
Teams were expected to use IR beacons (each with a unique combination of frequency and duty cycle) mounted at each dispenser and hoop to navigate the field. Another way to sense the court was with black tape laid on the field. Similar to real basketball, there was a stripe of black marking the "3-pt" line, and in addition tape ran down the long half of the field, as well as in front of each dispenser.
For a more detailed description of the project/game (as well as the offensive coordinator), please refer to the documents below:
Teams were expected to use IR beacons (each with a unique combination of frequency and duty cycle) mounted at each dispenser and hoop to navigate the field. Another way to sense the court was with black tape laid on the field. Similar to real basketball, there was a stripe of black marking the "3-pt" line, and in addition tape ran down the long half of the field, as well as in front of each dispenser.
For a more detailed description of the project/game (as well as the offensive coordinator), please refer to the documents below:
| me218bprojectdescription1011.pdf |
| offensivecoordinator.pdf |
