Drivetrain
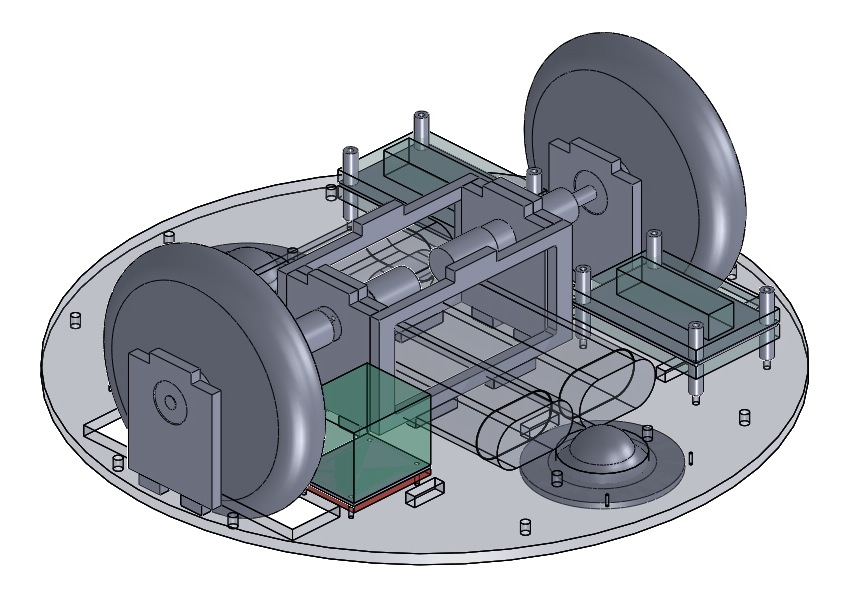
CAD drawing of drivetrain base.
Our drivetrain consists of two Maxon RE-max 216002 motors (with an 110323 gearbox that has an 84:1 gear ratio) that directly drive 5-inch scooter wheels. The motor uses a spider coupler that attaches the 3mm shaft with a custom machined adapter that steps from a 1/4" bore to a press-fit diameter for the wheel hub. The wheels were supported on both sides with a ball bearing to minimize the load on the motor. At a drive voltage of 22V this direct drive system allows for flexibibility with speed (up to 4 feet per second). Finally, the ball transfer casters in front and back allow for a robot clearance of 0.5".
The ample space in this platform also allows for the low storage of three batteries to decrease the center of gravity of the overall bot. The two rightmost circuit boards provide the pinouts to the E128 microcontroller, where as the two leftmost circuit boards (one not shown) are the motor drivers. The three unfilled rectangular slots seen on the platform are for tape sensors (two more slots, one underneath each of the spider couplers) are not pictured. The unfilled holes around the perimeter are for 2.25" standoffs, which keep the bottom platform attached to the top one.
The ample space in this platform also allows for the low storage of three batteries to decrease the center of gravity of the overall bot. The two rightmost circuit boards provide the pinouts to the E128 microcontroller, where as the two leftmost circuit boards (one not shown) are the motor drivers. The three unfilled rectangular slots seen on the platform are for tape sensors (two more slots, one underneath each of the spider couplers) are not pictured. The unfilled holes around the perimeter are for 2.25" standoffs, which keep the bottom platform attached to the top one.
